Porous Material Pick-and-Place Feasibility Friday
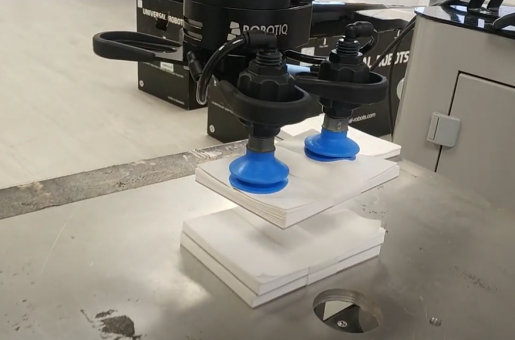
Today’ #FeasibilityFriday, is a pick-and-place application testing the feasibility of the vacuum gripper moving porous material for a pharmaceutical component manufacturer.
For this study, we used a 6-axis UR7e cobot arm from Universal Robots and the Airpick vacuum gripper from Robotiq.
